语言 :

NVIDIA Omniverse™ 是专为虚拟协作和实时逼真模拟打造的开放式平台。随着用户和团队在虚拟世界中连接设计工具、资源和项目以协同进行迭代,创作者、设计师和工程师的复杂可视化工作流程也发生转变。
在单个交互式平台上实时整合用户和主流行业 3D 设计工具。无需准备数据便可即时进行更新、迭代和更改,从而简化工作流程。
Omniverse 能实时完成可扩展的渲染,而且画质达到最终帧的水平。实时实现精美、物理属性准确且逼真的视觉效果。
只需构建模型一次,即可在任意地方渲染。在任何设备上实现 NVIDIA RTX™ 渲染的逼真度。轻松分享您的工作成果,并确保其原样呈现。
对于以惊艳、逼真、光线追踪的渲染作为设计灵魂的行业,NVIDIA Omniverse 可转变其工作流程。
该平台灵活、可定制,并采用全新的 Omniverse 应用程序、扩展程序和 Connector,实现了持续增强。
借助 NVIDIA Omniverse,可以通过实时的光线和路径追踪对世界进行物理属性准确的模拟,从而实现逼真的可视化效果。
该平台在协作、模拟和可视化方面提供了出色的灵活性和定制性。此外,它还支持无头云部署、无缝建模以及环境场景和机器人模型共享。
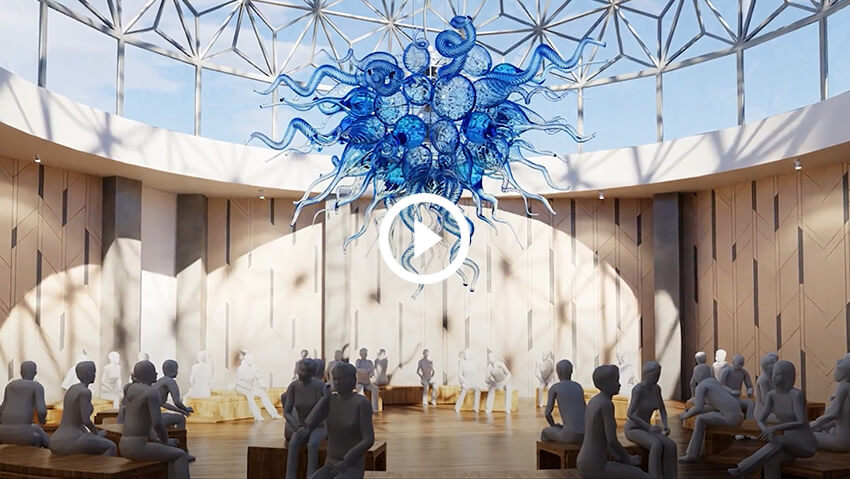
了解 Omniverse 如何转变建筑、工程和施工领域
现在,即使同时使用不同的软件应用程序,项目团队也能在单个交互式平台上进行整合,从而能实时地快速开发建筑模型。
团队无需准备数据或抽取模型,便能轻松制作出物理属性准确的精美视觉效果。
借助导出逼真模型(具有 RTX 光线追踪质量)的能力,快速迭代并探索更多设计方案。团队、客户和承包商可以随时随地在不同设备上查看高保真模型。
NVIDIA Omniverse 加强了 NVIDIA Drive Sim™ 的功能,后者是一款基于 Omniverse 构建的用于测试和验证自动驾驶汽车的应用程序。
Omniverse 提供了极其严格的计时、可重复性和实时性能,可对自动驾驶技术进行物理属性准确的模拟测试。

观看 Omniverse 如何验证自动驾驶技术
Omniverse 为支持高性能的实时模拟而构建,它原生支持多 GPU 配置,能驱动大批量的传感器和严格控制可重复场景的时序。
该平台可为所有车辆传感器(包括激光雷达和普通雷达)实现物理属性准确的传感器模拟,以及物理属性准确的摄像头建模。
NVIDIA Omniverse 的统一世界模型基于 Pixar 的通用场景描述 (USD),可捕捉静态和动态的模拟状况,并允许用户通过 DRIVE Sim 轻松进行访问、读取和修改。
NVIDIA Omniverse 在单个交互式环境中整合分散在全球的团队,让他们能更高效地迭代和取得丰富的创意成果。
在笔记本电脑、数据中心或任何其他搭载了 RTX 的设备上运行 Omnverse 显著缩短了投产时间。

了解 Omniverse 如何转变建筑、工程和施工领域
推动跨地点、团队和主流行业软件应用程序的无缝实时协作,并在缩短投产时间的同时取得丰富的创意迭代成果
借助 NVIDIA RTX,支持与 USD 内容相关的实时、高质量的多 GPU 光线追踪和路径追踪。
使用 NVIDIA 模拟和 AI 技术的新成果,轻松高效地模拟物理属性准确的复杂 3D 环境。
NVIDIA Omniverse 可连接分散的团队、主流设计应用程序和多个数据源,以提供实时可视化和协作。
通过在任何搭载了 RTX 的设备上运行 Omniverse,将制造和产品开发的每个阶段(从概念设计到工厂车间)连接起来,体验实时工作流程和大型数据集的可视化。

观看 Omniverse 如何驱动机器人和制造创新
从草图和表面模型到物理属性准确的渲染,团队现在能通过无缝的交互确定产品定义。
组合各种应用程序的数据,以确保建立一致且最新的数字线程,从而连接整个产品设计和制造过程。
实现对未来边缘连接的 AI 增强型工厂的即时、实时和全方位远程监控。
借助 NVIDIA Omniverse,可以通过实时的光线和路径追踪对世界进行物理属性准确的模拟,从而实现逼真的可视化效果。
该平台在协作、模拟和可视化方面提供了出色的灵活性和定制性。此外,它还支持无头云部署、无缝建模以及环境场景和机器人模型共享。
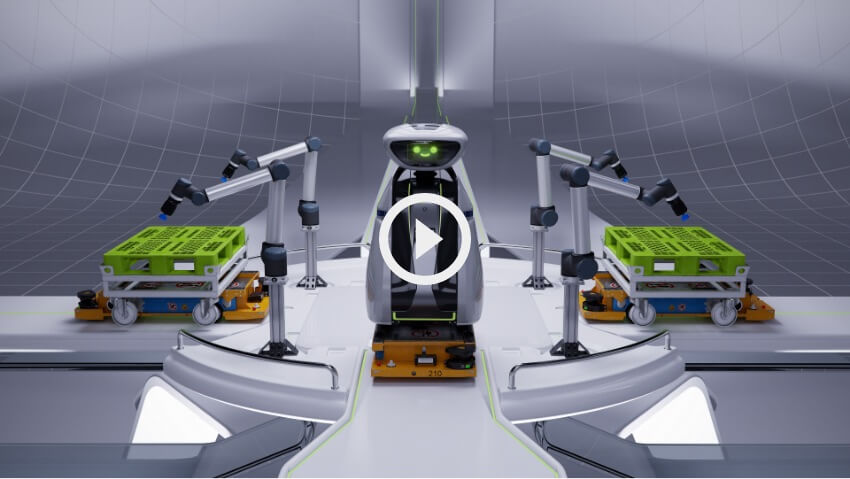
观看 NVIDIA R.EVA 机器人在虚拟环境中的构建流程
NVIDIA PhysX® 提供高保真度、稳定、快速且支持 GPU 的物理特性,可逼真地模拟机器人及其与世界的交互,从而大幅减小模拟与现实之间的差距。
借助实时、高质量、多 GPU 的光线追踪和路径追踪技术,实现对复杂 3D 世界的高保真模拟,从而让机器人将虚拟世界视为现实世界。
通过 NVIDIA Isaac™ SDK、机器人操作系统 (ROS) 接口、全功能 Python 脚本编写工具以及用于导入机器人和环境模型的插件,轻松将机器人大脑连接到虚拟世界。
未来展望
{kind=link}